The connection to the vehicle (or multiple vehicles) is set up within the DroneKit script. Scripts import and call the
connect() method. After connecting this returns a Vehicle object from which you can get/set parameters and attributes, and control vehicle movement.
The most common way to call
connect() is shown below:from dronekit import connect # Connect to the Vehicle (in this case a UDP endpoint) vehicle = connect('127.0.0.1:14550', wait_ready=True)
The first parameter specifies the target address (in this case the loopback address for UDP port 14550). See Connection string options for the strings to use for other common vehicles.
The second parameter (
wait_ready) is used to determine whether connect() returns immediately on connection or if it waits until some vehicle parameters and attributes are populated. In most cases you should use wait_ready=True to wait on the default set of parameters.connect() also has arguments for setting the baud rate, the length of the connection timeout, and/or to use a custom vehicle class.
There is more documentation on all of the parameters in the
API Reference.Connection string options
The table below shows connection strings you can use for some of the more common connection types:
| Connection type | Connection string |
|---|---|
| Linux computer connected to the vehicle via USB | /dev/ttyUSB0 |
| Linux computer connected to the vehicle via Serial port (RaspberryPi example) | /dev/ttyAMA0 (also set baud=57600) |
| SITL connected to the vehicle via UDP | 127.0.0.1:14550 |
| SITL connected to the vehicle via TCP | tcp:127.0.0.1:5760 |
| OSX computer connected to the vehicle via USB | dev/cu.usbmodem1 |
| Windows computer connected to the vehicle via USB (in this case on COM14) | com14 |
| Windows computer connected to the vehicle using a 3DR Telemetry Radio on COM14 | com14 (also set baud=57600) |
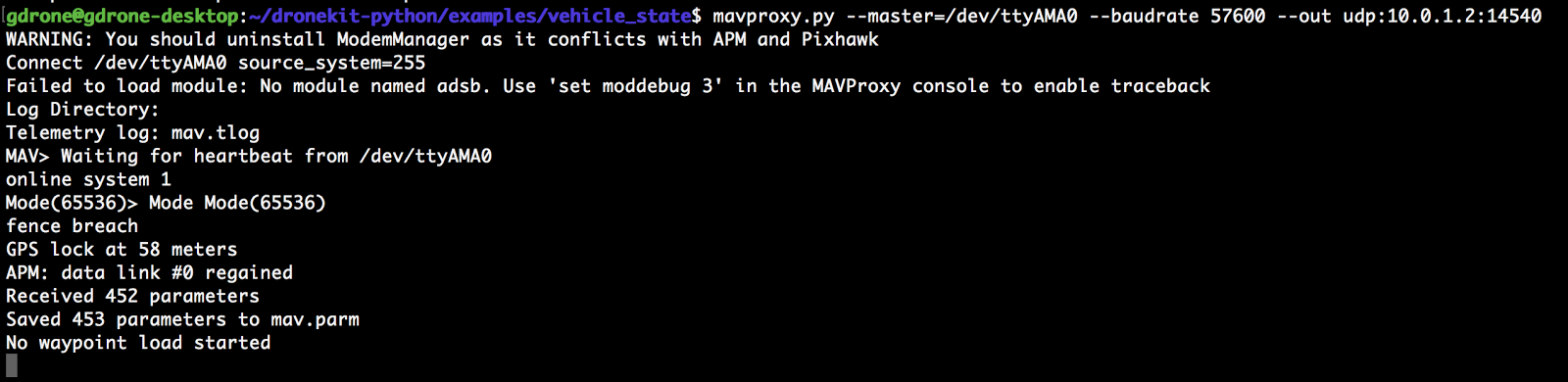
in my case using a connected to the vehicle via Serial port ->
/dev/ttyAMA0 (also set baud=57600)
ex> connection_string = "/dev/ttyAMA0"
vehicle=connect(connection_string, wait_ready=True)
But not working
Now working
~/Gwang_ws$ mavproxy.py --master=/dev/ttyAMA0,57600
gdrone@gdrone-desktop:~/Gwang_ws$ python show_info.py --connect 127.0.0.1:14550


next plan -> "simple_goto.py"